The above animation aims to be a slight improvement over one on Wikipedia, which (incidentally) does not correctly describe the velocity field that it is depicting. The Wikipedia image doesn’t show a checkerboard of moving material, nor does it have a nice depiction of streamlines.
Before describing this animation, it might be helpful to look at a simpler motion (a rolling body) in order to review the difference between streamlines, streaklines, and pathlines. Consider a simple rigid body consisting of a disk of small radius (shown in gray below) along which it rolls along a tabletop, along with a larger-radius extension of the body (shown in color below) which can dip down below the table surface (as if there is a slot cut into the table so that part of the body rolls under it).
STREAMLINES: These are tangent to the instantaneous velocity field. For a rolling rigid body, the motion is always circular about the instantaneous center of rotation at the bottom of the wheel. Accordingly, this image shows the streamlines at various points in time as the disk rolls along:
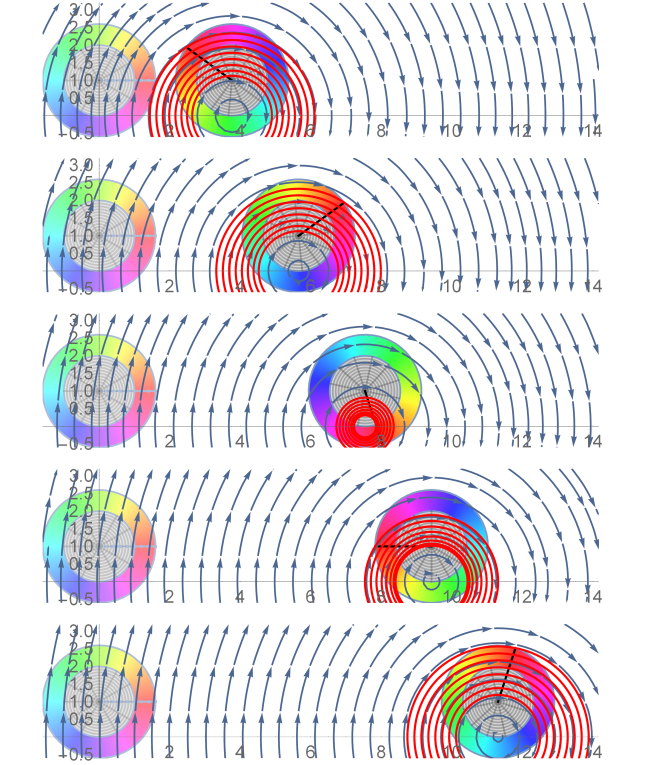
This image of streamlines is drawn not just on the body itself but also on its “virtual extension” in order to emphasize that (for rigid rolling) the instantaneous velocity is circular around the instantaneous center of rotation (bottom of the wheel). A particular set of streamlines is drawn in red. These are the ones that pass through a set of points that are evenly distributed on a spoke of the wheel (shown in black).
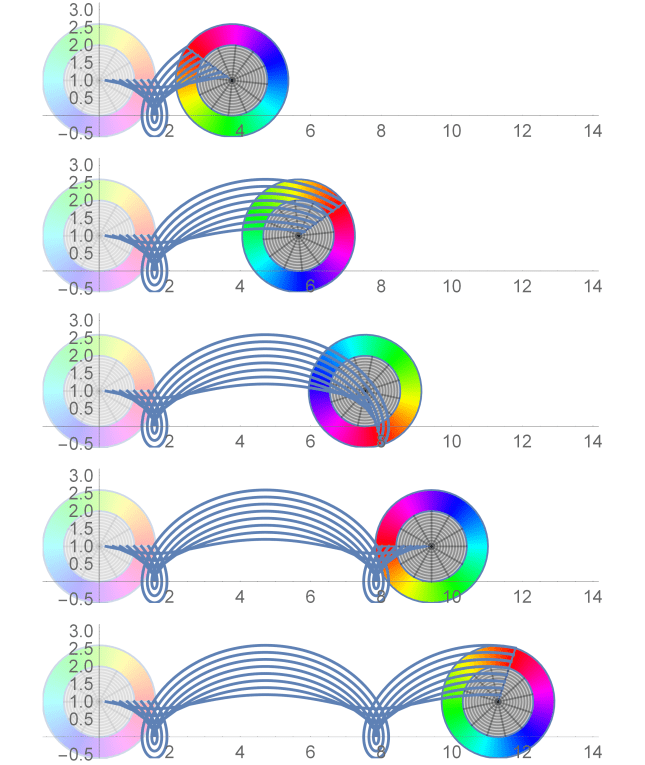
STREAKLINES: These are the lines you would see if a magic gremlin were to sit at a given location in space and “spraypaint” the material as it passes by. Suppose that an assembly line of gremlins (located where you see the dots in the first image) are pointing their spray paint cans at the body while it rolls past. Then they would form the black streaklines shown here at various times:

Important: The streaklines are made by gremlins who are sitting still and spraying material as it passes by.
PATHLINES: Are made by gremlins who “ride” with the material, spraying a record of where they have been (as if we were watching the rolling body from behind a window, and those whacky gremlins would spray paint onto the window as they pass by). Accordingly, here are the pathlines for group of gremlins who were initially coincident with the gremlins in the above streakline plot:
GRIDLINES are any set of lines that are painted on the body like tattoos. Such lines move with the body (like a tattoo).
Continue reading →