The presentation slides (downloadable as PowerPoint and PDF) describe the basic principles and application advantages of the material point method (MPM).
To follow this tutorial, you need to know basic equations for the finite-element method.


The presentation slides (downloadable as PowerPoint and PDF) describe the basic principles and application advantages of the material point method (MPM).
To follow this tutorial, you need to know basic equations for the finite-element method.
An older post (https://csmbrannon.net/2013/09/29/particle-basis-function-in-the-cpdi-method/) showed particle basis functions in 1D, demonstrating that they retain overlapping support with neighboring particles when using CPDI even when the particles are stretched to be large multiples of the grid cell length. In the 1D context of those examples, “holes” in CPDI basis functions are impossible.
This post shows an extreme 2D example (suggested by John Nairn, Jim Guilkey, and Michael Homel*) that can deleteriously lose overlapping support of particle shape functions, which can then allow non-physical material interpenetration.

The enrichment discussion of the CPDI2 publication* provided the following figure to illustrate the CPDI2 basis functions:

This figure, however, has the shortcoming of not clearly depicting the partition of unity property.
In hindsight, we should have used…
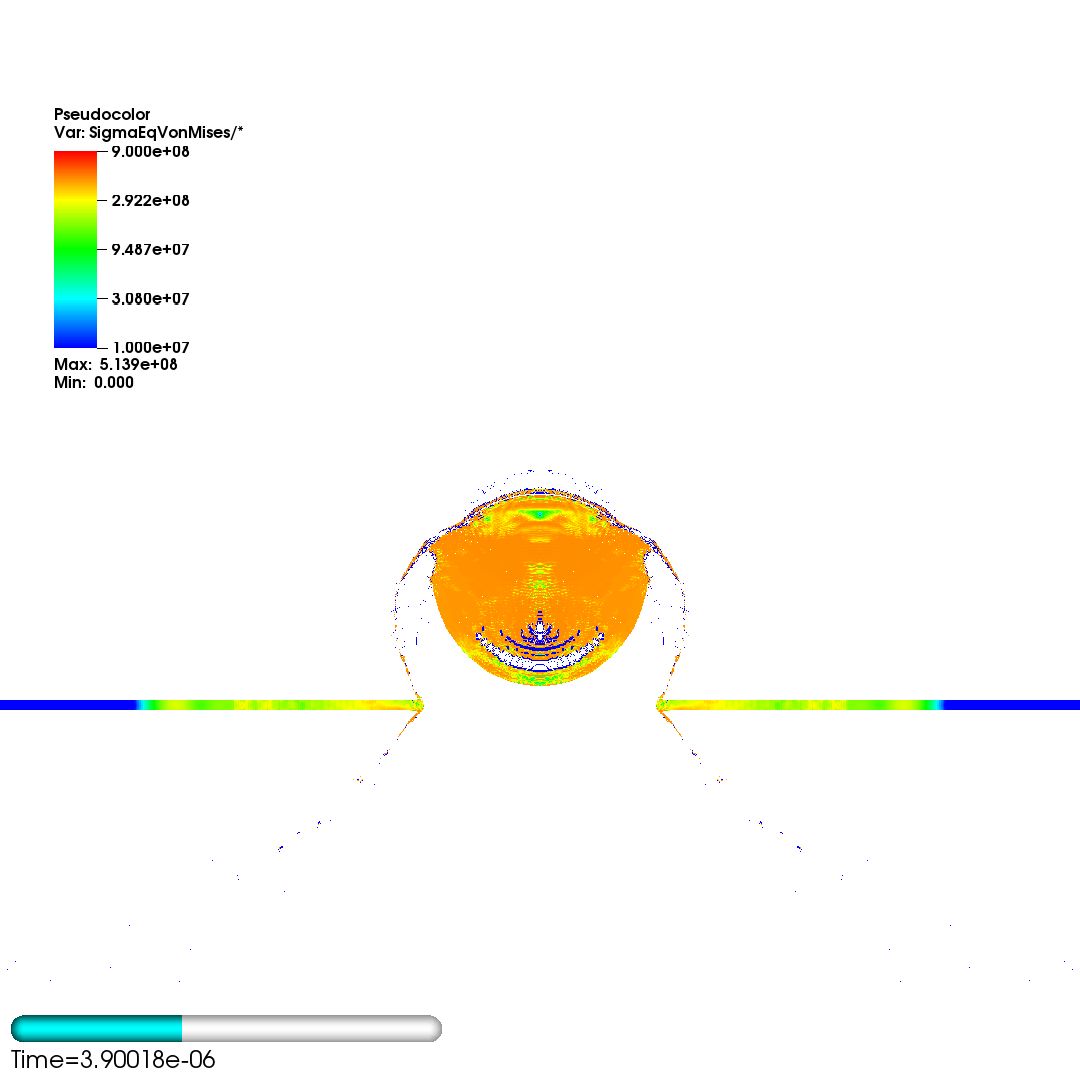
ABSTRACT: A simulation of a simple penetration experiment is performed using Material Point Method (MPM) through the Uintah Computational Framework (UCF) and interpreted using the post-processing visualization program VisIt. MPM formatting sets a background mesh with explicit boundaries and monitors the interaction of particles within that mesh to predict the varying movements and orientations of a material in response to loads. The modeled experiment compares the effects of an aluminum sphere impacting an aluminum sheet at varying velocities. In this work, the experiment called launch T-1428 (by Piekutowski and Poorman) is simulated using UCF and VisIt. The two materials in the experiment are both simulated using a hypoelastic-plastic model. Varying grid resolutions were used to verify the convergent behavior of the simulations to the experimental results. The validity of the simulation is quantified by comparing perforation hole diameter. A full 3-D simulation followed and was also compared to experimental results. Results and issues in both 2-D and 3-D simulation efforts are discussed. Both the axisymmetric and 3-D simulation results provided very good data with clear convergent behavior.
See the link below for the full report.
This is an abstract for
NWU2013: Advances in Computational Mechanics with Emphasis on Fracture and Multiscale Phenomena. Workshop honoring Professor Ted Belytschko’s 70th Birthday. April 18, 2013 – April 20, 2013, Evanston, IL, USA
The organizers allocated only 10 minutes for each person’s talk (including big wigs like Tom Hughes), so we might just present this topic in the form of a puppet show with enough information to tickle the audience to chat with us about it in the hallway!
Authors:
Rebecca Brannon*, Alireza Sadeghirad, James Guilkey
Department of Mechanical Engineering
University of Utah
Salt Lake City, UT, 84112
*Email: Rebecca.Brannon@utah.edu
Click here to see an invited talk for the 2013 Advances in Computational Mechanics Conference celebrating the 70th birthday of Thomas J.R. Hughes.
The animation below shows
RED: simple shear in physical configuration
BLUE: simple shear with the polar rotation removed (i.e., the pure stretch)
GREEN: the deformation corresponding to the approximation that D-bar (given by the unrotated symmetric part of the velocity gradient) is actually the rate of reference logarithmic strain. This is found by integrating D-bar through time to obtain the apparent logarithmic strain, and then exponentiating this apparent strain to obtain an apparent reference stretch.
GRAY: rotation of the green deformation back to the spatial configuration.


Contact pressures
Sanders, A. P., and R. M. Brannon. (2012). “ Scaled surrogate Hertzian bearing pairs for contact and wear testing.” Transactions of the Orthopaedic Research Society 2012 Annual Meeting, San Francisco, CA, Feb. 4-7, Poster 2070. 2012 ORS poster 01 small
Abstract
New implant bearing materials require extensive laboratory testing before clinical use, but the currently practiced contact and wear test methods impose limitations. Screening wear tests of prototype materials are typically done using simple bearing shapes (such as a ball-on-flat pair) and low loads. These tests are relatively simple and inexpensive, but they lack representative bearing shapes and contact stresses. Simulator wear tests on full-scale components overcome this shortcoming by implementing higher loads and complex, physiologic motion patterns. However, these tests are lengthy and expensive; so, they are reserved for final design testing. Surrogate test specimens that would mimic the contact mechanics of full-scale bearing pairs could improve the relevance of early screening tests. This research examines the hypothesis that a reduced-scale surrogate Hertzian contact pair can elicit a smaller scale, equal stress version of the contact response of a larger original contact pair. A chosen original contact pair mimics a knee implant femoral-tibial condylar interface, and a full-scale surrogate pair is found using recently published formulas. New formulas were derived to find a smaller version of the surrogate pair. The contact pairs were tested in quasi-static normal loading, and their contact patches were measured to evaluate the hypothesis.
Kakarla, D., A. P. Sanders, S. Siskey, K. Ong, N. Ames, J. O. Ochoa, and R. M. Brannon. (2012). “Modeling, Testing, and Analysis of Impulse Response of Femoral Head Reduction in Ceramic Hip Prostheses.” Transactions of the Orthopaedic Research Society 2012 Annual Meeting, San Francisco, CA, Feb. 4-7, Poster 2076.
Abstract
Hip simulator wear tests including micro-separation conditions have revealed that abnormal loading events can outweigh normal loading conditions in causing wear of hard-on-hard bearings. Yet, there is a paucity of data to describe the mechanics of abnormal events such as edge loading by femoral neck impingement or femoral head subluxation. Though the magnitude of head subluxation has been measured in-vivo for a variety of human activities, there are apparently no corresponding reports of the concurrent head-liner contact forces; accurate measurements of the same may be rendered difficult by the transient, impulsive nature of edge loading. This report provides initial laboratory results of an in-vitro and in-silico study of impulsive femoral head reduction whose ultimate aim is to quantify dynamic edge-loading contact forces and stresses. The study implements an engineering model of proximal-lateral head subluxation and edge loading as could occur in a lax hip during the swing phase of gait. Rapid reduction is caused by applying a sudden cranio-caudal motion to the acetabular liner. In the laboratory, the femur’s response to this input is measured with strain gages and a laser vibrometer.

