


ABSTRACT: Code verification against analytical solutions is a prerequisite to code validation against experimental data. Though solid-mechanics codes have established basic verification standards such as patch tests and convergence tests, few (if any) similar standards exist for testing solid-mechanics constitutive models under nontrivial massive deformations. Increasingly complicated verification tests for solid mechanics are presented, starting with simple patch tests of frame-indifference and traction boundary conditions under affine deformations, followed by two large-deformation problems that might serve as standardized verification tests suitable to quantify accuracy, robustness, and convergence of momentum solvers used in solid-mechanics codes. These problems use an accepted standard of verification testing, the method of manufactured solutions (MMS), which is rarely applied in solid mechanics. Body forces inducing a specified deformation are found analytically by treating the constitutive model abstractly, with a specific model introduced only at the last step in examples. One nonaffine MMS problem subjects the momentum solver and constitutive model to large shears comparable to those in penetration, while ensuring natural boundary conditions to accommodate codes lacking support for applied tractions. Two additional MMS problems, one affine and one nonaffine, include nontrivial traction boundary conditions.
For a copy of the paper along an implementation of the vortex problem, see our simple matlab MPM code.
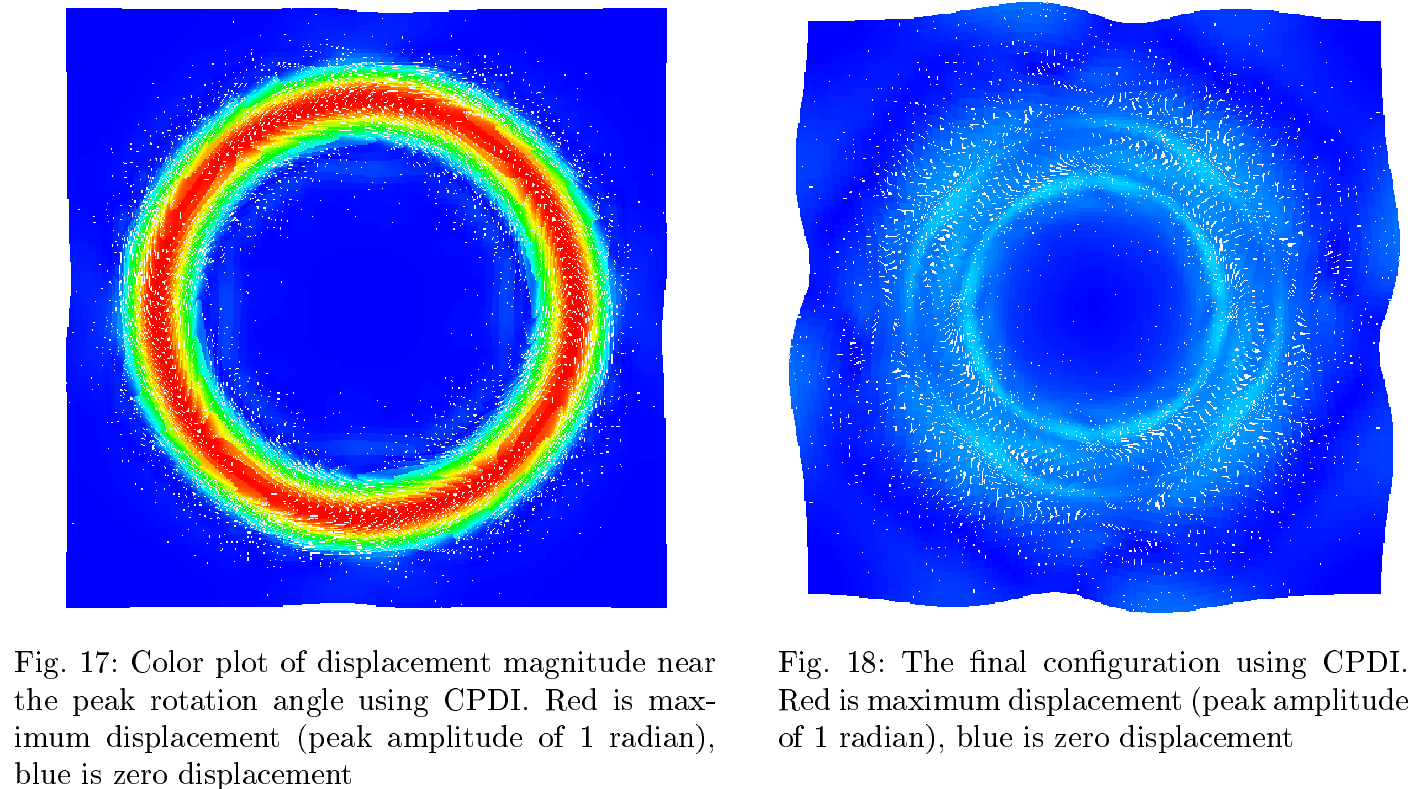
Here are some eye-catching graphics (see the paper itself for details):






 as the particle basis function. To the contrary, and as explained in detail in the bottom of this post, the particle basis function is the coefficient of the particle data value appearing in an expansion of a field as it is used in the discretization of governing equations. The solution of the governing equations uses a mapping of particle data to the grid. Consequently, because all fields are treated as expansions on the grid, the particle basis function (found by setting the particle value to 1 and all other particle data to zero) must be a grid expansion (so it MUST be piecewise linear on the grid if using linear shape functions). This proper definition of the particle basis function is shown below in dark gray. The particle basis function is NOT the top hat function (shown in light gray), nor is it
as the particle basis function. To the contrary, and as explained in detail in the bottom of this post, the particle basis function is the coefficient of the particle data value appearing in an expansion of a field as it is used in the discretization of governing equations. The solution of the governing equations uses a mapping of particle data to the grid. Consequently, because all fields are treated as expansions on the grid, the particle basis function (found by setting the particle value to 1 and all other particle data to zero) must be a grid expansion (so it MUST be piecewise linear on the grid if using linear shape functions). This proper definition of the particle basis function is shown below in dark gray. The particle basis function is NOT the top hat function (shown in light gray), nor is it  as commonly and misleadingly asserted. The relatively complicated derivation of the particle basis function is provided at the bottom of this post. In the images below, two options are considered for the mapping
as commonly and misleadingly asserted. The relatively complicated derivation of the particle basis function is provided at the bottom of this post. In the images below, two options are considered for the mapping  particle data to the grid nodal value
particle data to the grid nodal value  :
:

 is taken as the pseudo-inverse of
is taken as the pseudo-inverse of 
 over the pth particle domain
over the pth particle domain  . The GIMP variants of MPM are similar except that they evaluate
. The GIMP variants of MPM are similar except that they evaluate  using the conventional
using the conventional  grid basis functions rather than the adaptive (and actually computationally simpler) ones used in CPDI. Legacy “standard” MPM evaluates
grid basis functions rather than the adaptive (and actually computationally simpler) ones used in CPDI. Legacy “standard” MPM evaluates  , which causes grid-crossing errors. The figure groupings below use the CPDI formula
, which causes grid-crossing errors. The figure groupings below use the CPDI formula  in which
in which 