The following Material Point Method (MPM) simulation of sloshing fluid goes “haywire” at the end, just when things are starting to settle down:

(if the animated gif isn’t visible, please wait for it to load)

The following Material Point Method (MPM) simulation of sloshing fluid goes “haywire” at the end, just when things are starting to settle down:
(if the animated gif isn’t visible, please wait for it to load)
These images show the initial configuration of a body (square) and a nonlinear deformation of that body into a curvy shape (to the right of the square). Overlaid on the actual deformed shape is the so-called tangent mapping at the indicated point. It coincides with the nonlinear mapping to first-order accuracy.
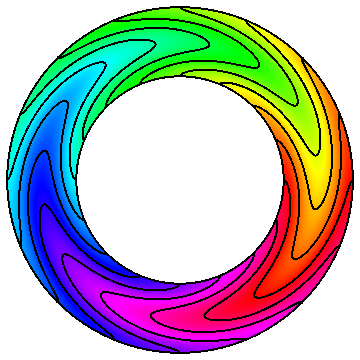
Illustrated below is the solution to an idealized problem of a linear elastic annulus (blue) subjected to twisting motion caused by rotating the T-bar an angle 
This simple problem is taken to be governed by the equations of equilibrium 

Tough disk impacting brittle disk
Below are links to two simulations of disks colliding. The first is elastic and the second uses a fracture model with spatially variable strength based on a scale-dependent Weibull realization. Both take advantage of the automatic contact property of the MPM.
WeibConstMovie: disks colliding without fracture
WeibPerturbedGood: disks colliding with heterogeneous fracture
This basic capability to support statistically variable strength in a damage model has been extended to the Kayenta plasticity model in Uintah.
Below are shown comparisons of the exact and numerical solution for the vortex ring problem on a square domain.
In a conventional MPM formulation, the shape functions on the grid are the same as in a traditional FEM solution. In the CPDI, the shape functions on the grid are replaced by alternative (and still linearly complete*) shape functions, given by piecewise linear interpolations of the traditional FEM shape functions to the boundaries of the particles. This change provides FEM-level accuracy in moderately deforming regions while retaining the attractive feature of MPM that particles can move arbitrarily relative to one another in massively deforming regions (provided, of course, that the deformation is updated in a manner compatible with the constitutive model).
In the images below, the shaded regions are the traditional FEM “tent” linear shape functions in 1-D, and the solid lines are the CPDI interpolated shape functions, which clearly change based on particle position relative to the grid. Both the traditional FEM tent functions and these new CPDI functions are linearly complete (i.e., they can exactly fit any affine function). The tremendous advantage of CPDI is that the basis functions are extraordinarily simple over a particle domain, thus facilitating exact and efficient evaluation of integrals over particle domains.

Aleatory uncertainty in constitutive modeling refers to the intrinsic variability in material properties caused by differences in micromorphology (e.g., grain orientation or size, microcracks, inclusions, etc.) from sample to sample. Accordingly, a numerical simulation of a nominally axisymmetric problem must be run in full 3D (non-axisymmetric) mode if there is any possibility of a bifurcation from stability.
Dynamic indentation experiments, in which a spherical ball impacts to top free surface of a cylindrical specimen, nicely illustrate that fracture properties must have spatial variability — in fact, the intrinsic instability that leads to radial cracking is regarded by the Utah CSM group as a potential inexpensive means of inferring the spatial frequency of natural variations in material properties.

Radial cracking in dynamic indentation experiments.

3D model Experimental Setup
Rim cracking of polyethylene acetabular liners and squeaking in ceramic components are two important potential failure modes of hip implants, but the loads and stresses that cause such failures are not well understood. Contact stresses in hip implants are analyzed under worst case load conditions to develop new wear testing methods to improve the pre-clinical evaluation of next-generation hip implants and their materials. Complicated full-scale hip implant simulator tests are expensive and take months to complete. A primary goal of this work is to find inexpensive surrogate specimen shapes and loading modes that can, in inexpensive lab tests taking only a few hours, produce the same wear patterns as seen in full-scale prototype testing. Continue reading
MMS stands for “Method of Manufactured Solutions,” which is a rather sleazy sounding name for what is actually a respected and rigorous method of verifying that a finite element (or other) code is correctly solving the governing equations.
A simple introduction to MMS may be found on page 11 of The ASME guide for verification and validation in solid mechanics. The basic idea is to analytically determine forcing functions that would lead to a specific, presumably nontrivial, solution (of your choice) for the dependent variable of a differential equation. Then you would verify a numerical solver for that differential equation by running it using your analytically determined forcing function. The difference between the code’s prediction and your selected manufactured solution provides a quantitative measure of error.