
Tag Archives: introduction
Publication: Advances in X-ray Computed Tomography Diagnostics of Ballistic Impact Damage
J.M. Wells and R.M. Brannon

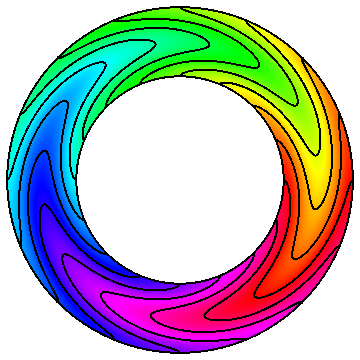
Dynamic indentation of SiC-N ceramic by a tungsten carbide sphere. Left: experimentally observed impact crater and radial cracking (both highlighted for clarity). Middle: BFS model prediction of externally visible damage. Right: prediction of internal damage (suitable for validation against XCT data).
With the relatively recent introduction of quantitative and volumetric X-ray computedtomography (XCT) applied to ballistic impact damage diagnostics, significant inroads have beenmade in expanding our knowledge base of the morphological variants of physical impactdamage. Yet, the current state of the art in computational and simulation modeling of terminalballistic performance remains predominantly focused on the penetration phenomenon, withoutdetailed consideration of the physical characteristics of actual impact damage. Similarly, armorceramic material improvements appear more focused on penetration resistance than on improved intrinsic damage tolerance and damage resistance. Basically, these approaches minimizeour understanding of the potential influence that impact damage may play in the mitigation orprevention of ballistic penetration. Examples of current capabilities of XCT characterization,quantification, and visualization of complex impact damage variants are demonstrated anddiscussed for impacted ceramic and metallic terminal ballistic target materials. Potential benefitsof incorporating such impact damage diagnostics in future ballistic computational modeling arealso briefly discussed.
Available Online:
http://dx.doi.org/10.1007/s11661-007-9304-5
http://www.mech.utah.edu/~brannon/pubs/7-2007WellsBrannonAdvancesInXrayComputedTomographyDiagnosticsOfBallisticDamage.pdf
Tutorial: Introduction to Mohr’s circle

Verification Research: The method of manufactured solutions (MMS)
MMS stands for “Method of Manufactured Solutions,” which is a rather sleazy sounding name for what is actually a respected and rigorous method of verifying that a finite element (or other) code is correctly solving the governing equations.
A simple introduction to MMS may be found on page 11 of The ASME guide for verification and validation in solid mechanics. The basic idea is to analytically determine forcing functions that would lead to a specific, presumably nontrivial, solution (of your choice) for the dependent variable of a differential equation. Then you would verify a numerical solver for that differential equation by running it using your analytically determined forcing function. The difference between the code’s prediction and your selected manufactured solution provides a quantitative measure of error.
Tutorial: Curvilinear coordinates
A self-study introduction to the general theory applied to 3-D Euclidean space. (It helps to read the “Elementary Vector and Tensor Analysis” document before attempting this one).
You may download the document here.
Tutorial: Slideshow introduction to mappings in continuum mechanics
Each time you generate output from input, you are using a mapping. The mappings in continuum mechanics have similarities with simple functions y=f(x) that you already know. This slideshow (which apparently renders properly only when viewed from PowerPoint on a PC rather than Mac) provides a step-by-step introduction to mappings of the type used in Continuum Mechanics.
You may download the rest of the document here.
Tutorial: Functional and Structured Tensor Analysis for Engineers
A step-by-step introduction to tensor analysis that assumes you know nothing but basic calculus. Considerable emphasis is placed on a notation style that works well for applications in materials modeling, but other notation styles are also reviewed to help you better decipher the literature. Topics include: matrix and vector analysis, properties of tensors (such as “orthogonal”, “diagonalizable”, etc.), dyads and outer products, axial vectors, axial tensors, scalar invariants and spectral analysis (eigenvalues/eigenvectors), geometry (e.g., the equations for planes, ellipsoids, etc.), material symmetry such as transverse isotropy, polar decomposition, and vector/tensor calculus theorems such as the divergence theorem and Stokes theorem. (A draft of this document was last released publically on Aug. 3, 2003. The non-public version is significantly expanded in anticipation of formal publication.)
You may download the rest of the document here.
Tutorial: Emacs and GDB
I remember learning how to use a debugger and Utah State University as an undergraduate. We learned to program in Fortran 90, and used a Microsoft debugger. It seemed cool, but honestly with the types of programs I was writing at the time, using print statement seemed to be effective enough and less of a hassle. Recently I have been working with the Uintah MPM code, which is MUCH larger and more complex than any code I’ve ever written. After several months of wading through the code I finally came across a problem that “cout” just could not help me solve. The code was suddenly crashing with an allocation error and giving no useful backtrace information. A colleague suggested that I use gdb to find out where the problem was occurring. It turned out to be very, very helpful and surprisingly easy to use. I’ve recently become a convert to Emacs, and found that the gdb interface in Emacs is especially nice. So here is goes:
